OP
OP
cyberos
Well-known member
- Joined
- Jul 9, 2024
- Threads
- 24
- Messages
- 218
- Reaction score
- 461
- Location
- Austin, TX
- Vehicles
- RX 350h, Cybertruck AWD
- Occupation
- Generative AI
- Thread starter
- #33
Good questions. I'll answer as best I can and admit where my knowledge is limitedWhat does this mean? Does it mean that Waymo is ready to drive anywhere and not just in pre-HD-mapped geofenced areas? When will this happen?
Your attachment states:
What is holding them back from deploying safe systems in all conditions? Is Waymo now able to deploy in all conditions because they have “solved the LIDAR point map problem”? If not, then when?
From page 4 of your attachment:
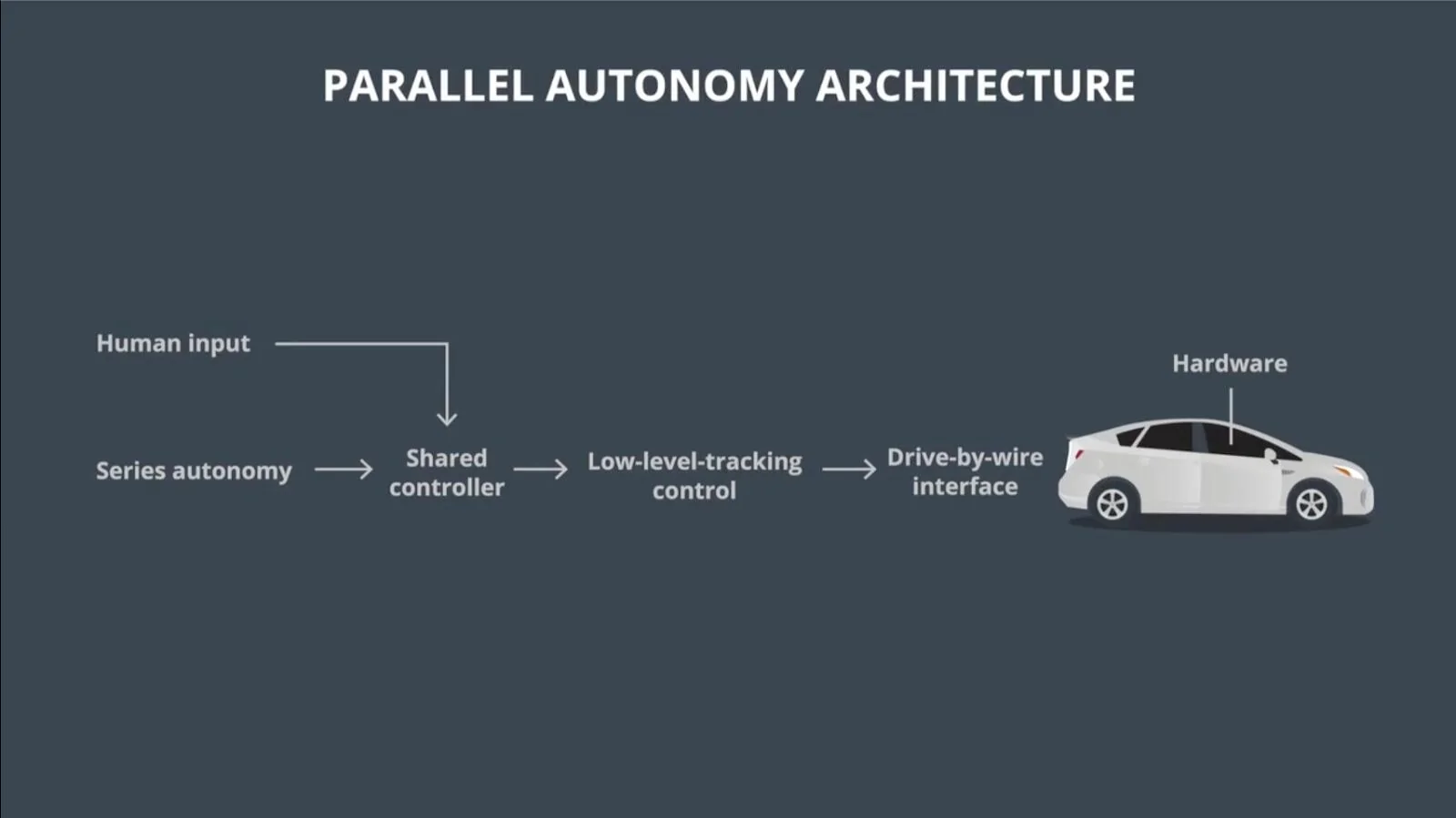
The above sounds like the “autonomy system” in the “parallel autonomy” [Tesla’s method] is already superior to the human driver when it comes to safety. Safety is the most important factor in autonomy and Robotaxis. This is why a very small percentage of the FSD disengagements are safety related. Most are related to navigation or personal preference in speed, lane change, etc.
So, why isn’t it possible for the “autonomy system” in the “parallel autonomy” to eventually be better than the human in not only safety, but also in the way the human drives (such as for speed, lane changes, turning, comfort, etc.)? Once this happens, we don’t need the human driver. Why do you think this is going to take longer than Waymo becoming able to drive everywhere?
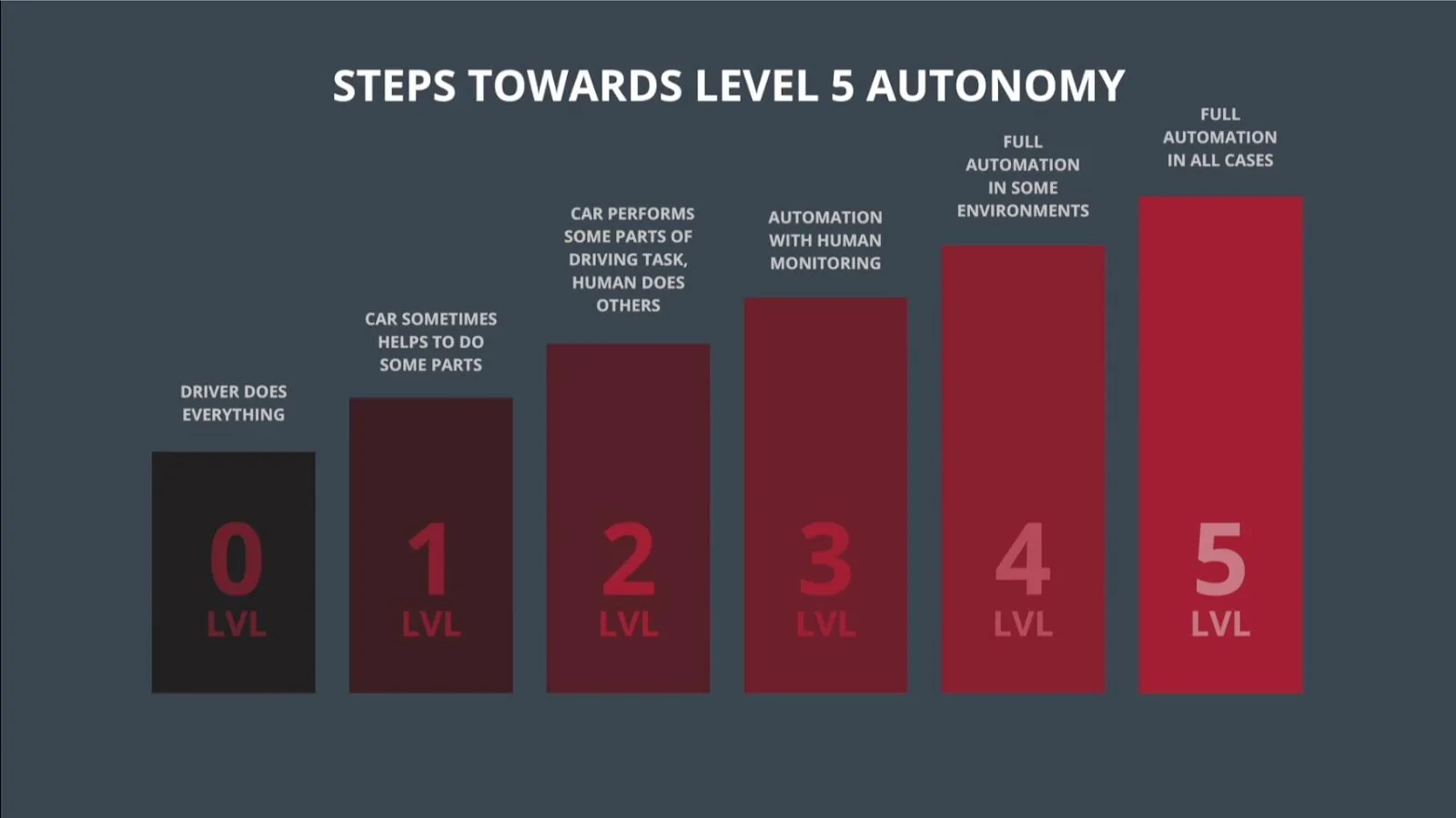
The reason why the Level 4 autonomous vehicles (series autonomy / no human intervention) need geofencing is to bound the amount of rigorous testing. Cruise Automotive (although controversial) articulated this very well. They built a virtual representation of the entire city of San Francisco and automated over 300 years of self-driving testing in this virtual world. Unfortunately I can no longer find the video on YouTube but if you hunt around you can find it
As to when this will happen, I will admit that I just don't know. The issue with Waymo's method is that cities evolve. When I lived in South San Francisco (a separate town btw) I would commute into The City (the actual San Francisco) in a Lexus LC500 with adaptive cruise control (radar). The advantage of this was that I could intervene frequently in the hot mess that is San Francisco city driving. I'm actually amazed that Waymo and can handle this (curious to hear from any SF Tesla drivers using FSD on Fell or Oak streets, through the Panhandle and the Lower Haight?)
You are correct in that one excerpt from the readings about parallel autonomy being a path forward for Waymo. Toyota came to the same conclusion after their Woven City autonomous vehicle experiment. The consensus seems to be that Level 4 autonomy is just not possible at scale (yet). Level 3 autonomy (parallel autonomy / human intervention) is actually achievable at scale, with today's technology
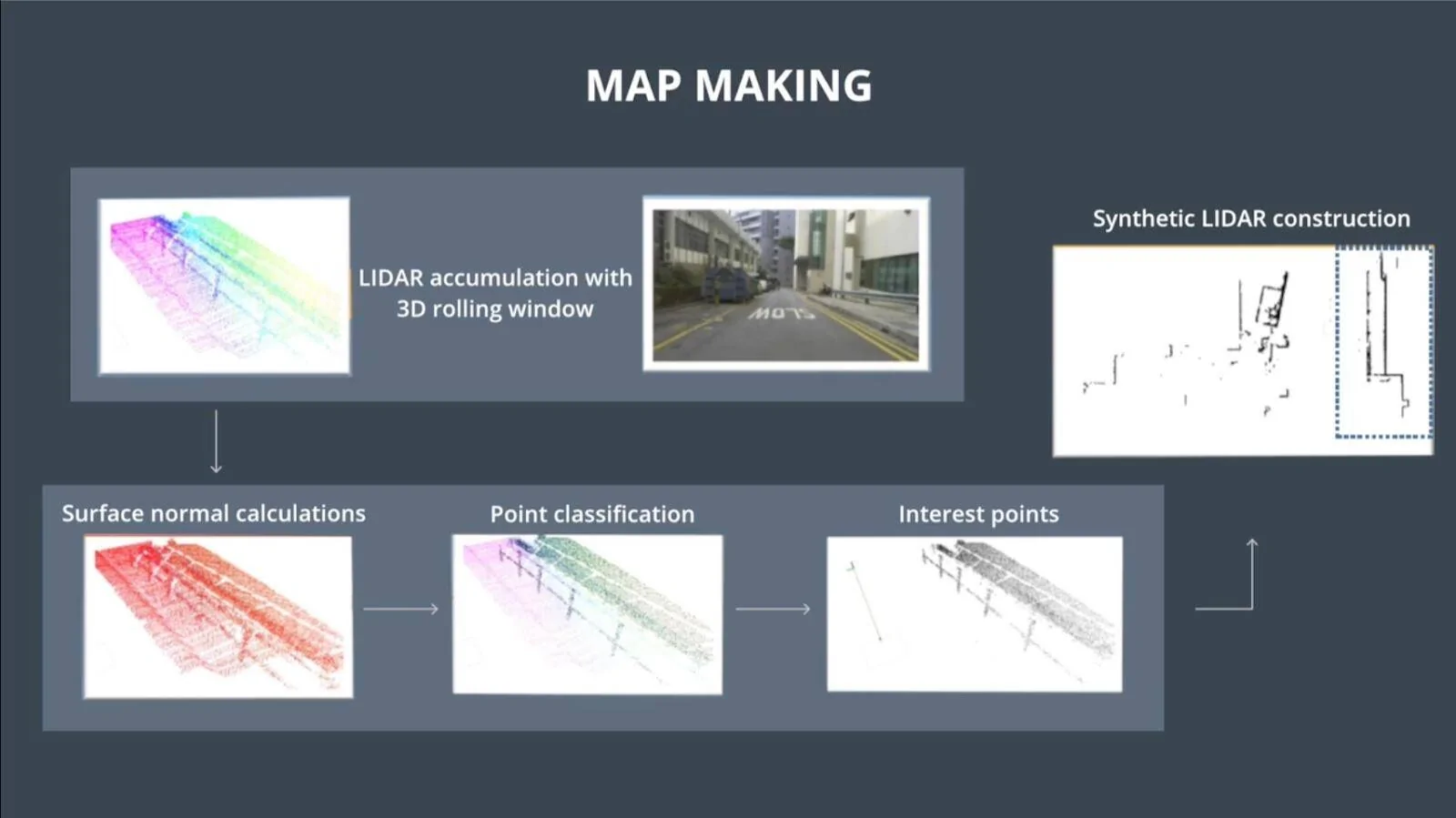
I think Elon's Robotaxi announcement this week will be the bomb that blows autonomous driving wide open. In fact I am willing to guess that Robotaxis will have LIDAR. I just don't see how Level 4 autonomy is achievable without it
There is a bigger player in all of this, Tesla Optimus. Tesla FSD pales in comparison to the economic potential of a roboticized workforce. This is a harder problem than driving because the robot actually needs to manipulate its environment, not just avoid obstacles
Criticism, differing opinions and corrections of my statements are welcome. I anticipate robotics being the "next big thing" in 2025 so the more I learn from crowdsourced information like this forum the better
Sponsored