cyberos
Well-known member
- Joined
- Jul 9, 2024
- Threads
- 23
- Messages
- 216
- Reaction score
- 439
- Location
- Austin, TX
- Vehicles
- RX 350h, Cybertruck AWD
- Occupation
- Generative AI
- Thread starter
- #1
*Disclaimer: I work for Google, but not Waymo
*Overall opinion: I use the Cybertruck's FSD all the time, even to drive 2-minutes down the street; it is awesome because it's here NOW
After seeing many FSD threads this past week and enjoying the Cybertruck's FSD myself I wanted to share a brief crash course on autonomous driving
References:
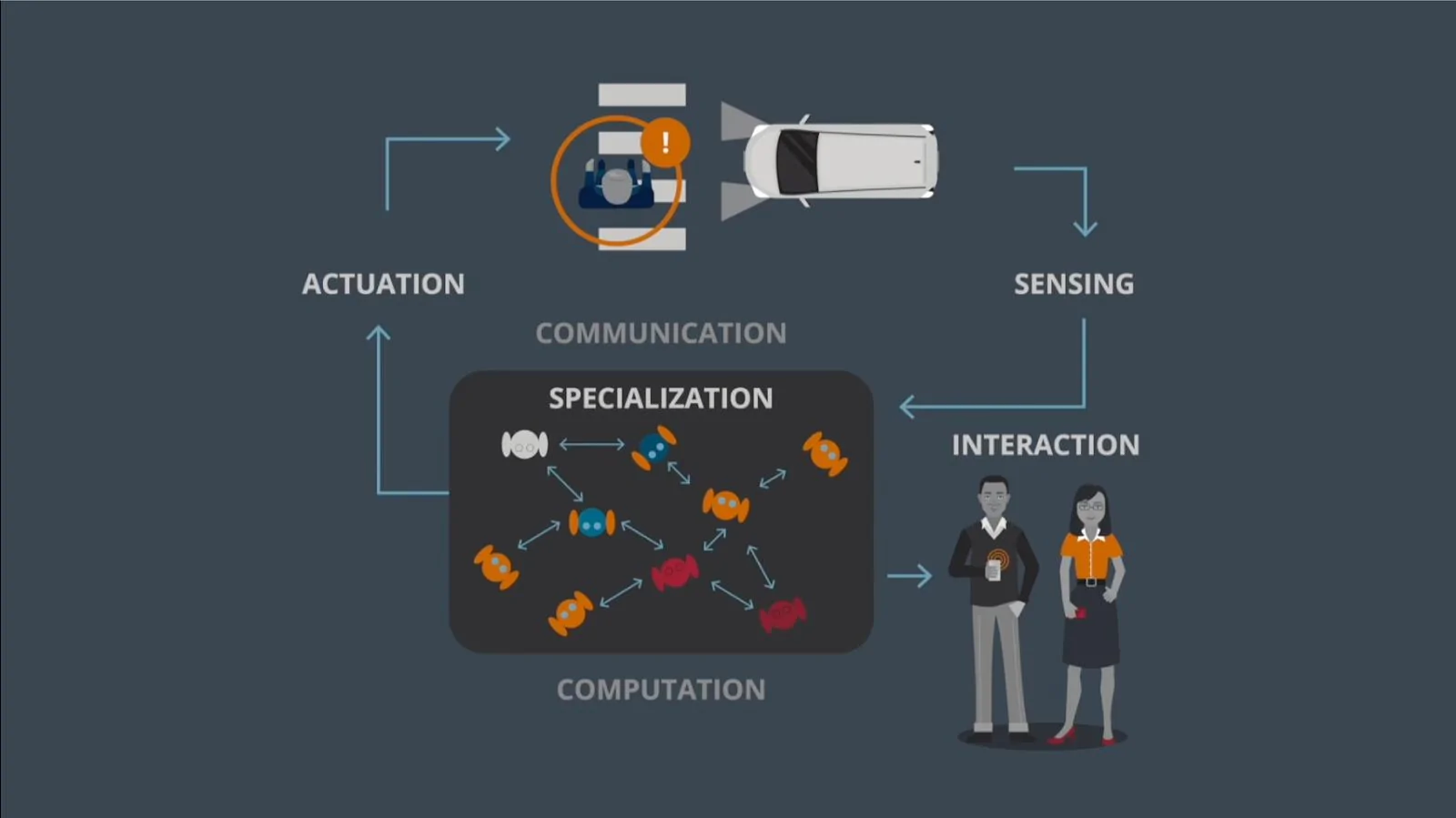
At a high level robots are just automated devices that perform physical tasks in the real world using 1. sensors (inputs) and 2. actuators (outputs)

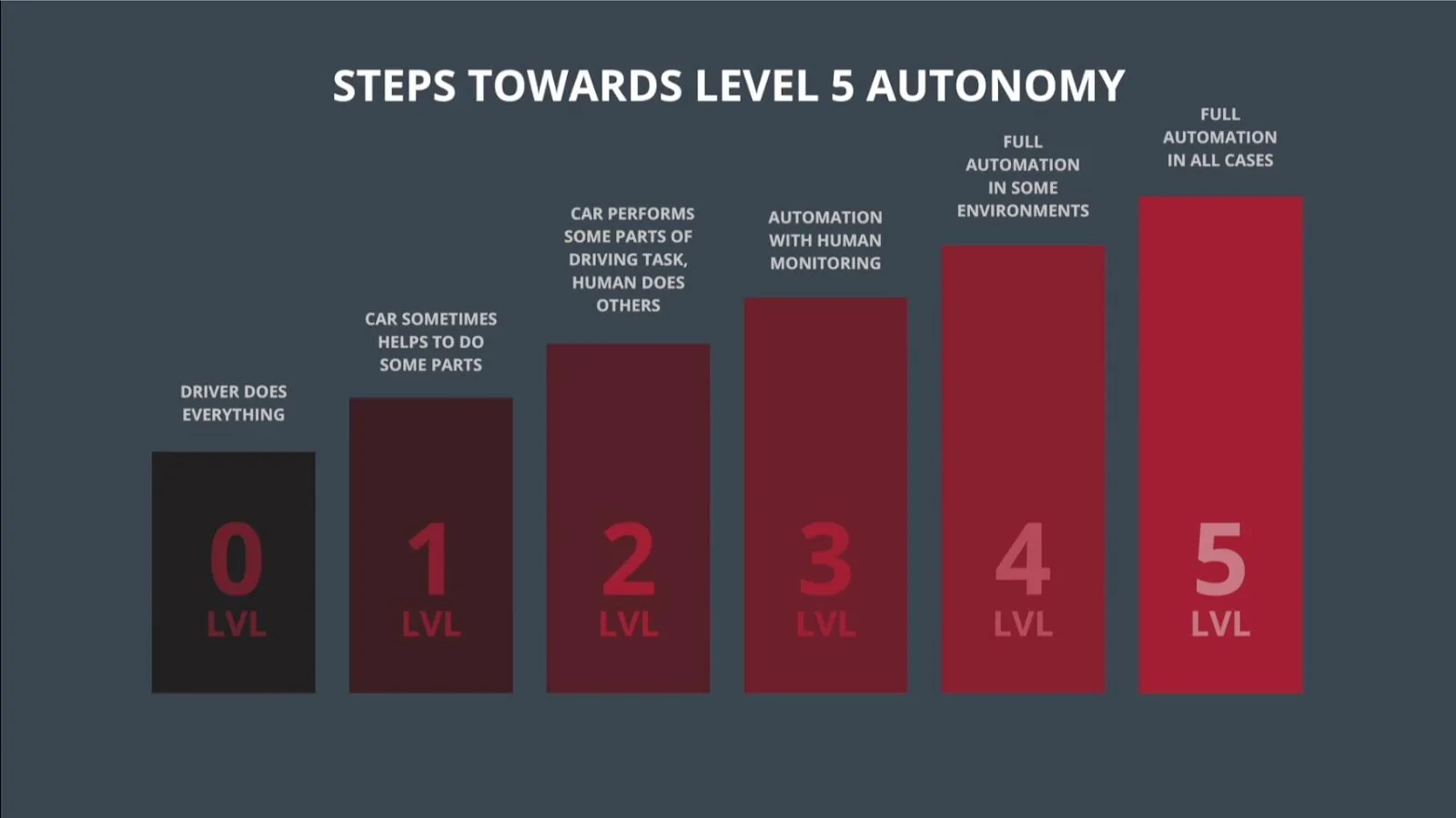
Tesla is Level 3 Autonomy, Waymo is Level 4
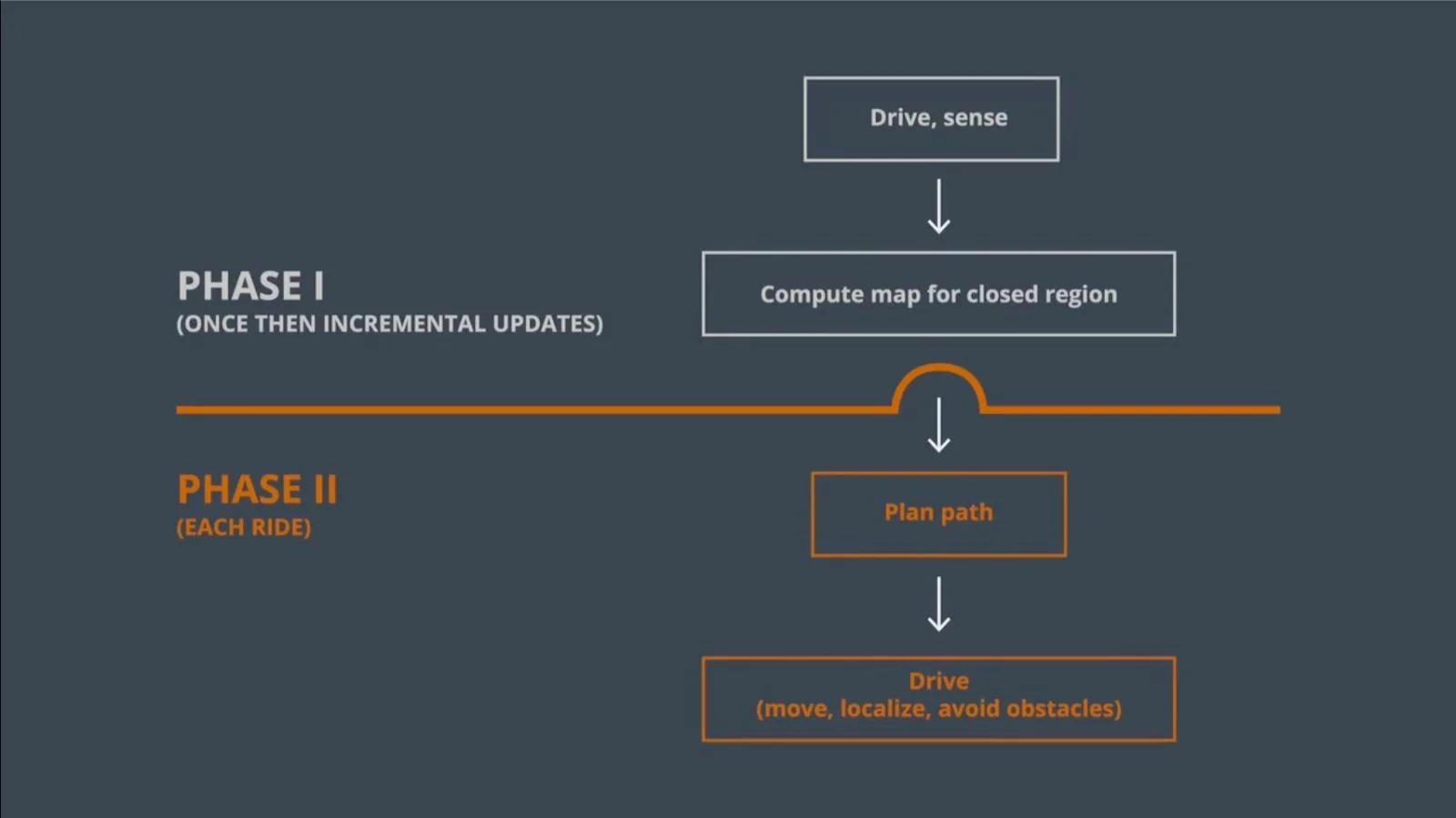
All Self Driving Cars "Map" Between Feature Space (virtual) and Physical Space (real)
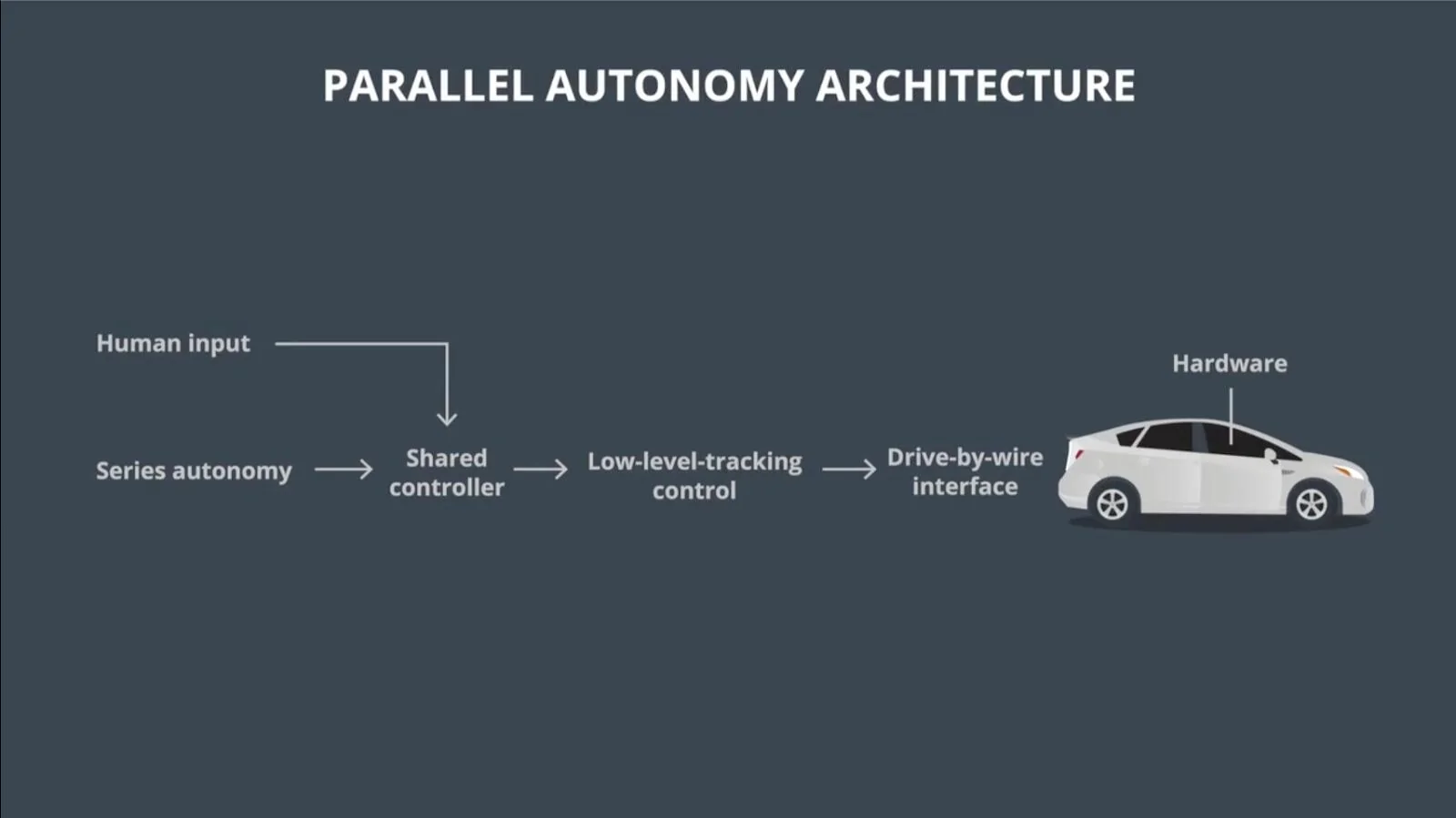
Tesla FSD is Parallel Autonomy (human-in-the-loop), Waymo is Series Autonomy (no human, mostly)
In robotics there are two types of autonomy, series and parallel:
Tesla's Big Failure: No LIDAR
In one sentence, robots need "laser imaging, detection and ranging" (LIDAR) to accurately perceive depth, occlusion, etc.
Longer answer is that LIDAR facilitates building a 3D point map of the world. Initially cameras were meant only for object detection. Tesla admirably expanded camera-based computer vision into FSD, but the lack of LIDAR is still problematic
Tesla's Reason for Camera-Only Computer Vision FSD: Cost
LIDAR (and the now removed radar from early model Teslas) is expensive and it's not just the hardware. The Cybertruck FSD update boasts that its neural network / machine learning model replaces over "300K lines of explicit C++ code". That's a lot of software engineering hours and millions of dollars saved
My (unverified) opinion is that there are nowhere near as many LIDAR 3D map examples as there are computer vision image and video examples. This means training a LIDAR machine learning model is not (yet) feasible
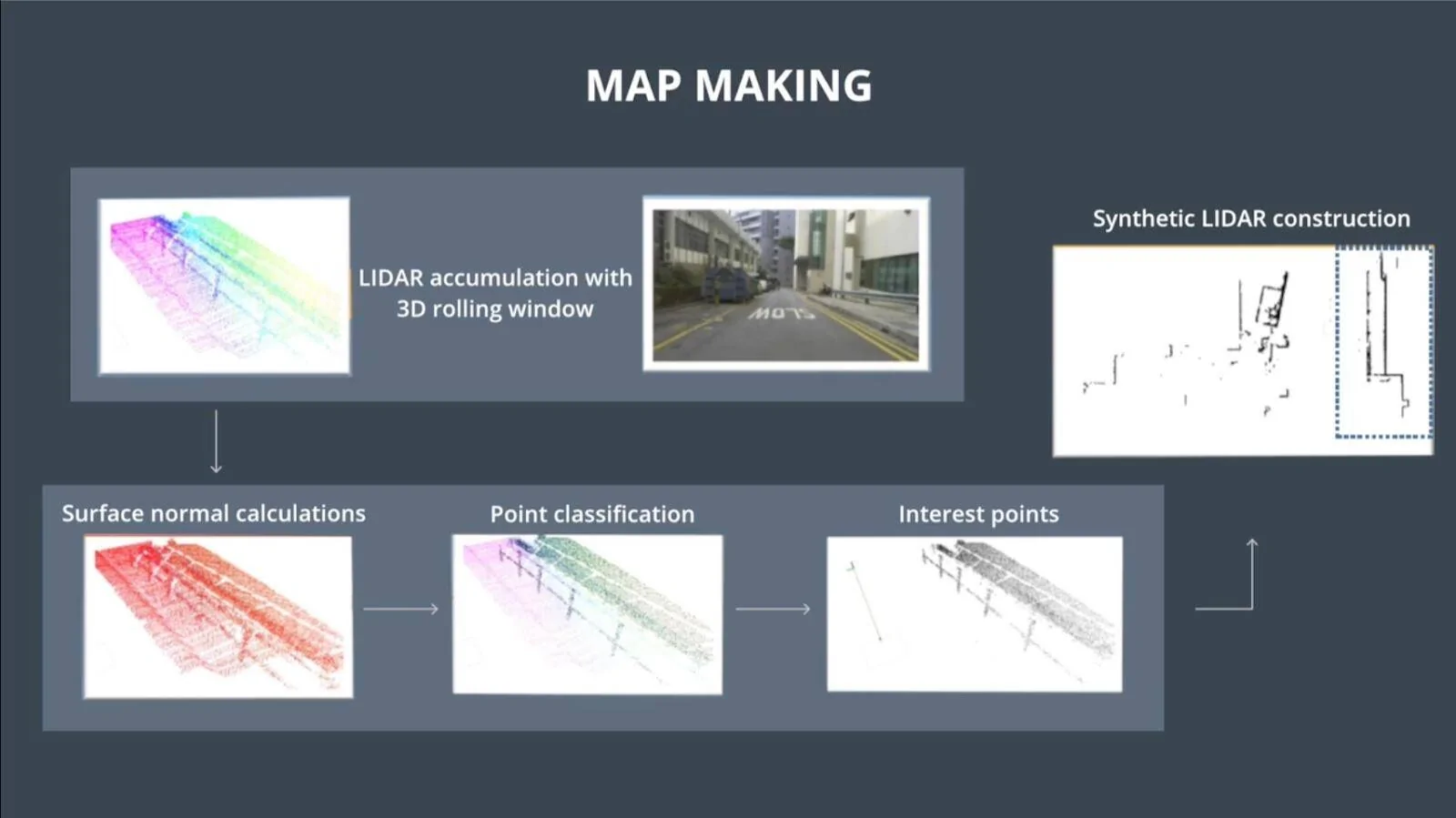
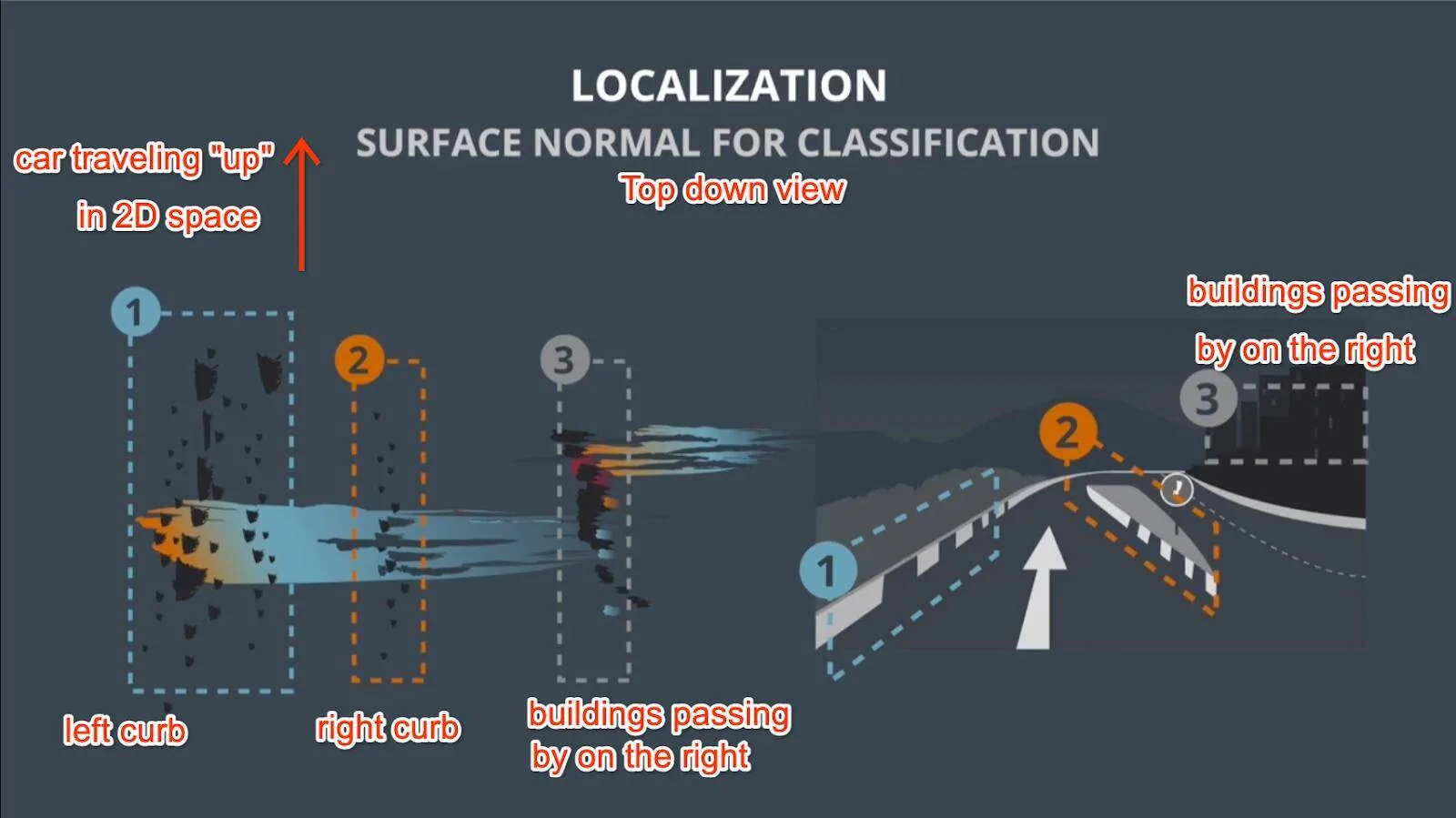
Waymo cleverly overcame this limitation by transforming the LIDAR 3D point map into a more manageable format. I have not had the time to read all the research, but Waymo solved the LIDAR point map problem, where a mess of 3D dots inhibited using machine learning fully
All of Waymo's research came at an extreme cost and they had Google / Alphabet money. Tesla just couldn't afford to run at a loss and had no other massively profitable business units to draw from
*Overall opinion: I use the Cybertruck's FSD all the time, even to drive 2-minutes down the street; it is awesome because it's here NOW
After seeing many FSD threads this past week and enjoying the Cybertruck's FSD myself I wanted to share a brief crash course on autonomous driving
References:
- MIT's course on Artificial Intelligence: Implications for Business Strategy
- Lecture, "Understanding Robotics"
- Lecture transcripts attached for convenience
At a high level robots are just automated devices that perform physical tasks in the real world using 1. sensors (inputs) and 2. actuators (outputs)
Tesla is Level 3 Autonomy, Waymo is Level 4
All Self Driving Cars "Map" Between Feature Space (virtual) and Physical Space (real)
- All of the sensors (cameras, LIDAR, radar, microphones, etc.) are used to create a map of our real world in a virtual world called "feature space"
- The car "thinks" and "acts" entirely in this feature space
- It needs the sensors to keep populating the feature space with objects, to try to mimic our physical world as much as possible
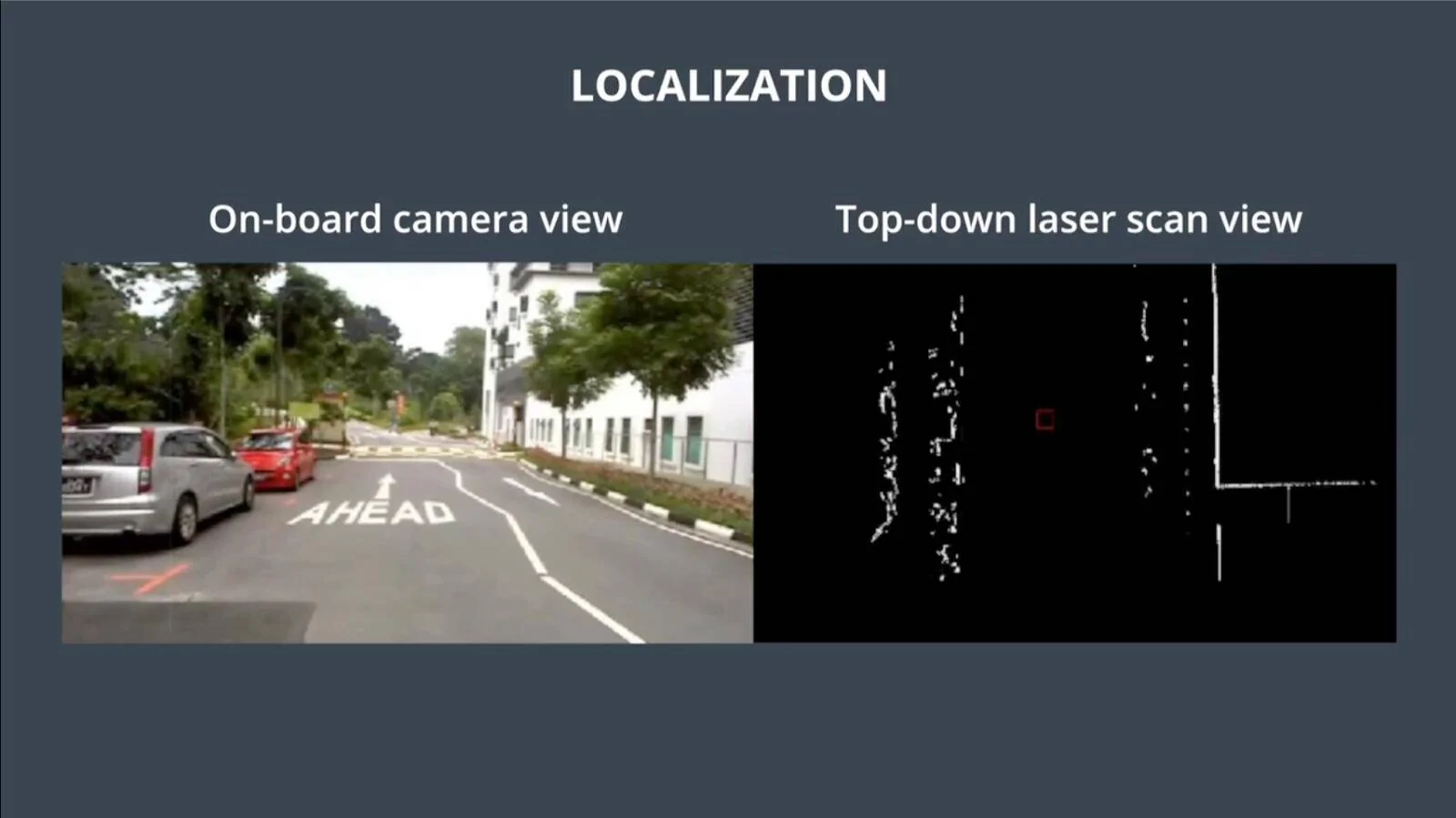
- This why the Cybertruck "drives over curbs" while Waymo "sees the curbs", Waymo's feature space is better populated, closer to our real world
Tesla FSD is Parallel Autonomy (human-in-the-loop), Waymo is Series Autonomy (no human, mostly)
In robotics there are two types of autonomy, series and parallel:
- Series autonomy (Waymo): either human in control or vehicle in control, not both
- Parallel autonomy (Tesla FSD): aka "Supervised" FSD
Tesla's Big Failure: No LIDAR
In one sentence, robots need "laser imaging, detection and ranging" (LIDAR) to accurately perceive depth, occlusion, etc.
Longer answer is that LIDAR facilitates building a 3D point map of the world. Initially cameras were meant only for object detection. Tesla admirably expanded camera-based computer vision into FSD, but the lack of LIDAR is still problematic
Tesla's Reason for Camera-Only Computer Vision FSD: Cost
LIDAR (and the now removed radar from early model Teslas) is expensive and it's not just the hardware. The Cybertruck FSD update boasts that its neural network / machine learning model replaces over "300K lines of explicit C++ code". That's a lot of software engineering hours and millions of dollars saved
My (unverified) opinion is that there are nowhere near as many LIDAR 3D map examples as there are computer vision image and video examples. This means training a LIDAR machine learning model is not (yet) feasible
Waymo cleverly overcame this limitation by transforming the LIDAR 3D point map into a more manageable format. I have not had the time to read all the research, but Waymo solved the LIDAR point map problem, where a mess of 3D dots inhibited using machine learning fully
All of Waymo's research came at an extreme cost and they had Google / Alphabet money. Tesla just couldn't afford to run at a loss and had no other massively profitable business units to draw from
Sponsored
Attachments
-
198.9 KB Views: 201
-
203.6 KB Views: 175
Last edited:
