JBee
Well-known member
- First Name
- JB
- Joined
- Nov 22, 2019
- Threads
- 18
- Messages
- 4,913
- Reaction score
- 6,362
- Location
- Australia
- Vehicles
- Cybertruck
- Occupation
- . Professional Hobbyist
- Thread starter
- #1

I just wanted to post this as a recap on some discussions that we have had over months and years, before we get some actual details from the delivery event, which will confirm how it was solved.
As most of us know, increasing the voltage of a EV system comes with various benefits, not all of which are directly noticeable.
Until now many of the EV vehicles available have been operating on 400V for a reason, and that is that 400V is a common voltage in power distribution networks, and because custom made transformers to get from the grid to EV voltages can largely be avoided altogether, especially for locations with low numbers of charger stalls.
Using 800V in EV's means that charging can only be done either with a custom 800V transformer connected to a 800V charger, or that the EV 800V pack is split electrically into two sub-packs, each of which are 400V that can be charged from the grid. Doing this means that they do not require a SC charger or the EV to boost the voltage before it can charge, rather, when charging they simply switch the configuration of the pack electrically to meet the required voltage.
This means that they can continue to use existing SuperChargers, up to v3 and 400V, and that newer chargers can be installed using 800V and a custom transformer, for even faster charge times, using a similar sized charge cable and port, without overheating. Otherwise to improve charging speeds using 400V would require a new larger connector and cable. This solves a few of these infrastructure issues.
By using a higher voltage it is possible to decrease cable size, which leads to less weight, but also smaller components, connectors and in particular smaller motors with similar, if not higher power outputs.
If we take the anticipated voltage, and the comments regarding "next-gen" regarding them being "rare-earth free" it would be logical to deduce, that like in the rear of M3/MY etc, the next-gen motor is of the induction type, and has no permeant magnets whatsoever. If we consider further that PM motors are constrained by the flux capacity (!), which density btw is measured in Teslas, of rare earth permanent magnets, we at some point must concede that flux densities produced by induction at high voltage, can not only produce smaller and lighter motors, but ones at significantly lower cost. The tradeoff is some efficiency, but this can be compensated for, by some more low cost cells to achieve the same range.
The good news is that induction motors are capable, like in the M3/MY, to be switched off completely, without the need for a clutch like is used in the semi, without significant eddy losses through the motor. The losses with induction motors are more from drivetrain and gearboxes. In a vehicle that is expected to do a lot of stop and go traffic, or city driving, and highway driving all at partial throttle, and induction motor would seem to be a good fit. It's important to realise that for most of the time, the vehicle is moving only at fractional power levels of those required to accelerate it fast, say from 0-60. For example: Cruise power levels are around 20kW, whereas acceleration in the Plaid is a huge 700kW. So making sure that motors can either be in their most efficient RPM/load zone, or turning them off completely has been an important way Tesla has maintained high EV efficiencies and range per pack.
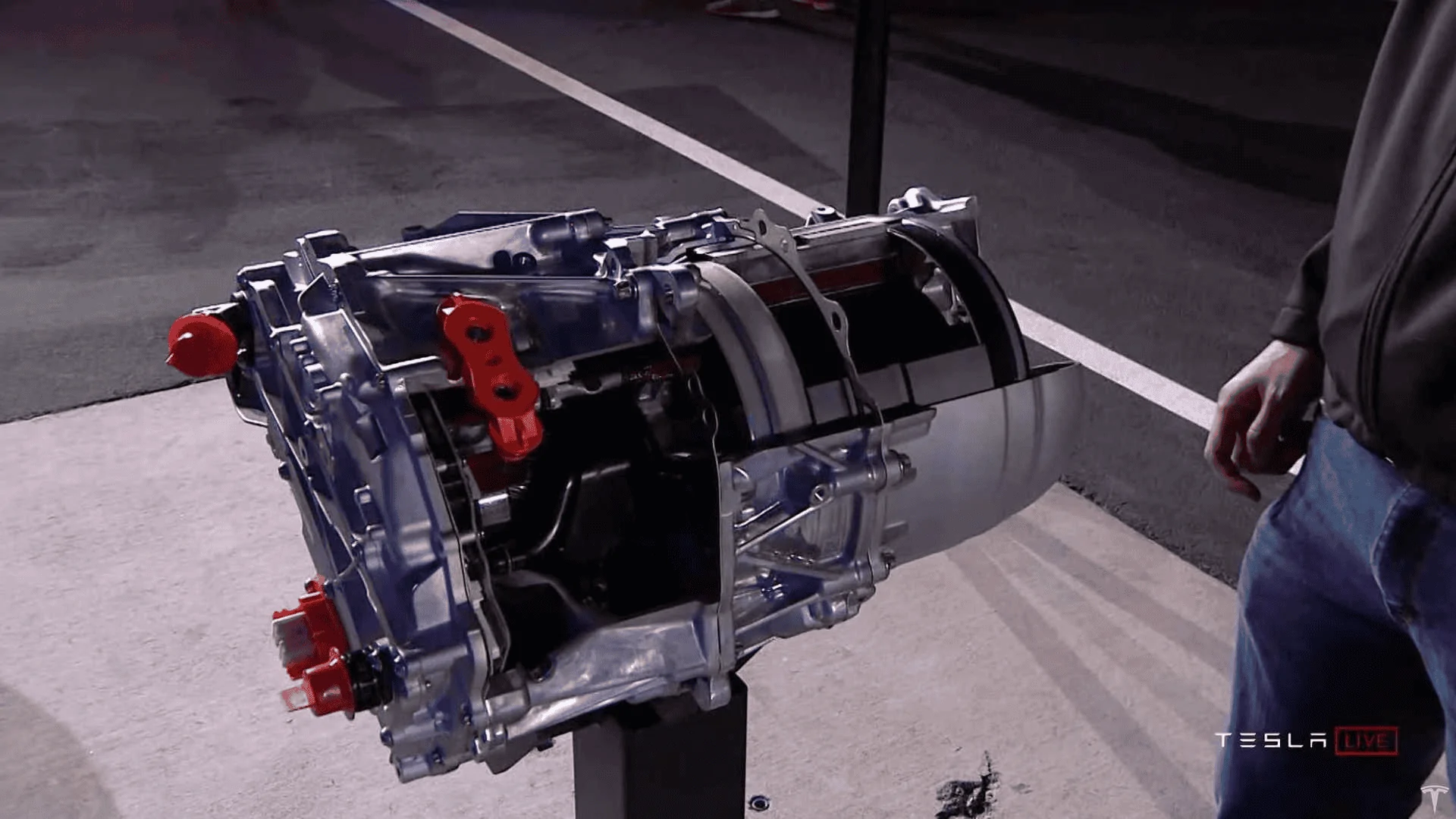
Now if we consider the power density of the Plaid motors one must recognize the relevance of high RPM. Obviously RPM is related to power output, but at some point the centripetal forces acting on the rotor cause it to expand. This is a problem in that the gap between the rotor and the stator (the stationary part) is intentionally kept as close as possible, to avoid energy losses across the gap. That is why the Plaid motors needed to have Carbon Fiber wrapped rotors, to basically keep the insides from flying out, at high RPM whilst maintaining the tightest possible gap to avoid losses. The plaid motor is a Permanent Magnet motor however, and not a induction motor. It also is only 400V, and not 800V. Note how small the motor part is in comparison to the differential and gearbox.
Now this is where it gets hypothetical, but interesting none the less. In summary, if the next gen motor is magnet-less, it could well be induction, if it is 800V as well, it could be even more power dense than the Plaid motor. To get to the RPM required to do so, it would also need to spin fast, meaning that it too would have to be CF wrapped (or other composite), to keep the rotor together.
Now if we take this together with the battery pack projections around 125kWh, and their potential discharge rates up to 1200hp or more, it is fairly safe to assume that there is enough capacity to provide more than Plaid level of kW into the CT drivetrain. Especially so as 4680 tabless design reduces heat, and will improve more over time.
The net result might well be that we don't get a quad motor anymore, because comparatively, the QM sized motor would be even smaller at 800V, and so it actually becomes more cost effective to use less motors and controllers, and in particular for off-road, to include differential lockers instead.
But we have one last problem to solve. Traction.
Most know that the MS Plaid has supercar levels of power at it's disposal, but a lot of that power can't be put down to the ground at low speeds because it is limited by how much traction the four wheels have to the ground. It's only at higher speeds, over 60mph that all the power can actually be put down and used to accelerate. Now traction is a combination of downforce and the coeffcient of friction of the tyres themselves. A CT weighs more than a Plaid, but also has more downforce because of it. A CT also has a larger tyre contact patch area than a Plaid. But, the CT being a tow and off road vehicle, which is likely speed restricted to 120mph (200kmh) like Highlander, it is highly likely that a larger gear ratio will be used on the CT, meaning more torque at lower wheel RPMs, which in turn also brings the power curve down and closer to the 0-60 range, giving it lots of power in the low speed range in comparison.
The combination of all the above factors, in particular the new 800V motors, means that I expect very good acceleration times from the CT, even from the "lowly" Dual Motor variant, in the mid to high 3 second mark. This will be substantially faster than the original spec, making the TM nearly redundant, apart from a few that have money to burn as well.
Overall, I really do think that the DM performance will be so good, that Tesla need not worry itself to much with a TM variant in the near future, or maybe at all for the majority of customers. The only thing would be to have a LR version for those that need it, which could simply be a result of 4680 improvements over time.
Simply, we are reaching the inflection point at which vehicle performance is being constrained not by shear horsepower alone, but by all the other system variables dictated by physics. This is what good first principles engineering is all about.
Sponsored
Last edited: