CyberGus
Well-known member
- First Name
- Gus
- Joined
- May 22, 2021
- Threads
- 91
- Messages
- 10,238
- Reaction score
- 33,893
- Location
- Austin, TX
- Vehicles
- 1981 DeLorean, 2024 Cybertruck
- Occupation
- IT Specialist
Sure, I could hack up a control system with response in the single-digit milliseconds using just a Raspberry Pi. This isn't the science of rocketry.I think pilotpete and wtibbits posts answer the latency question, but I just wanted to add that Toyota/Lexus implementation that EE showed is a particularly bad high latency example. That should not be considered the norm, neither should it be allowed in vehicles. The latency there is a few 100ms behind, which is silly long.
In the FPV drone world we live with 400Hz control loops (input commands are 400times a second/2.5ms) and accordingly they are nigh in-perceivable, despite also going through a radio transmitter and receiver as well as two controllers, an autopilot to translate etc. Measured control loop latencies are under 10ms in good systems, to the point that the video transmission of pictures back to the googles produces more latency, even though it's only 1-2 video frames out.
That's also why until more recently, most FPV was flown with analog video, that is essentially "phased locked loop" between the transmitter and receiver, meaning that the oscillation of the signal being transmitted was at the same time the receiver was getting it, and you had the least possible delay between light entering analog camera and exiting the analog screen in the googles. Even now the best digital transmission systems add another frame or so in latency because of digital processing inbetween, even though they are now running custom IC's dedicated to reduce latency. But that extra resolution and interference immunity is more beneficial than loosing an extra frame in time, so together with the lowered prices over the years is becoming more popular.
Here is a good reaction speed test to see how "low latency" 2 digit ms control latency is in comparison to our own reaction times. (Spoiler: we are an order of magnitude worse)
https://humanbenchmark.com/tests/reactiontime
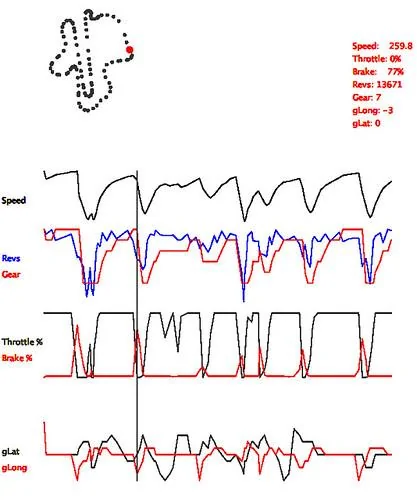
Another thing to mention here is that humans also have "predictive" capabilities that can be learnt. This means that even though the control system has latency, a person can steer etc ahead of time in anticipation of the event occurring, instead of during the event, to compensate for the latency in the control. This is why professional drivers can reduce lap times by out-braking others on the track, in that they can accurately predict where to start braking at the maximum rate before a corner to get to the corner entry speed, despite the vehicle not being able to accurately track the control input because of vehicle physics and inertia. Doing so means that you spend the least amount of time braking, and spend a higher percentage of time on the track at a higher speed, resulting in a higher average speed overall and the shortest lap times. (Sorry but this isn't really a skill they use much in the Indy500 on a loop!) Funnily enough, like on a PC racing simulator using a keyboard, you can be pretty fast around a track with just a digital on/off switch for accelerator and braking, if you train that technique. Have a look at how steep the throttle/brake graph is here, in comparison to speed and acceleration forces that result. They are always going from maximum acceleration to maximum deceleration of available traction.

If you consider the low latency of GPU processing of near real time game rendering, you can sort of get a feel for just how crazy fast processing and control is nowadays, way beyond human perception. So although there is a measurable latency, for all intents and purposes in the context of human capability, it has a negligible impact of control loop performance given our own high latencies and variablities.
Just to come back to the SBW in the CT, my comment regarding the progressive steering nature, of steering more than the steering input so that you have steering lock within one rotation of the steering wheel, this is actually complementary to human steering behaviour. I found this t be the case on my Landcruiser that had electrically assisted mechanical variable rate steering. Often the center dead-band on steering wheels at higher speed (the area where you can move the steering with little steering output) means you often feel like there is no to little output, so you often jerk the steering wheel to get a response. Over time though, you get used to responsiveness outside of the dead-band, and more often than not you end up with better steering inputs overall, because the steering ratio near the center allows for better fine control, whilst the ends allowing for more cornering with less input, and because that typically happens at lower speeds, means a smoother driving experience overall as you don't have to fumble over the steering wheel at full lock with uncoordinated hand movements.
The issue with the Audi IMHO is that they're processing the user inputs through their ADAS computer to override/mitigate those inputs for safety, traction control, etc. The ludicrous +100ms delay is occurring in the compute phase.
Fortunately, Tesla engineers have become experts at minimizing the delay between visual input and control output in their FSD package, so they should probably have no trouble with SBW.
However, given the existing systems (Audi etc.), the latency is a legitimate concern.
Sponsored
")