scottf200
Well-known member
- Joined
- Jul 31, 2021
- Threads
- 53
- Messages
- 2,221
- Reaction score
- 3,241
- Location
- Western NC
- Vehicles
- X; immed family 3 & Y
Your comments don't make any sense because HW4 with better cameras are getting FSD ... but you don't think the images are post processed. How'd they get HW4 vehicles on FSD then.Tesla does not use any kind of image post-processing, its sensor data directly into the ML model. So when the sensor changes, it is an even bigger difference for the machine learning models to deal with.
FSD is trained on video captured from cars using HW3. Since HW4 has better cameras that look totally different, the neural nets will need to be re-trained on these cameras once enough data has been accumulated.
Sponsored
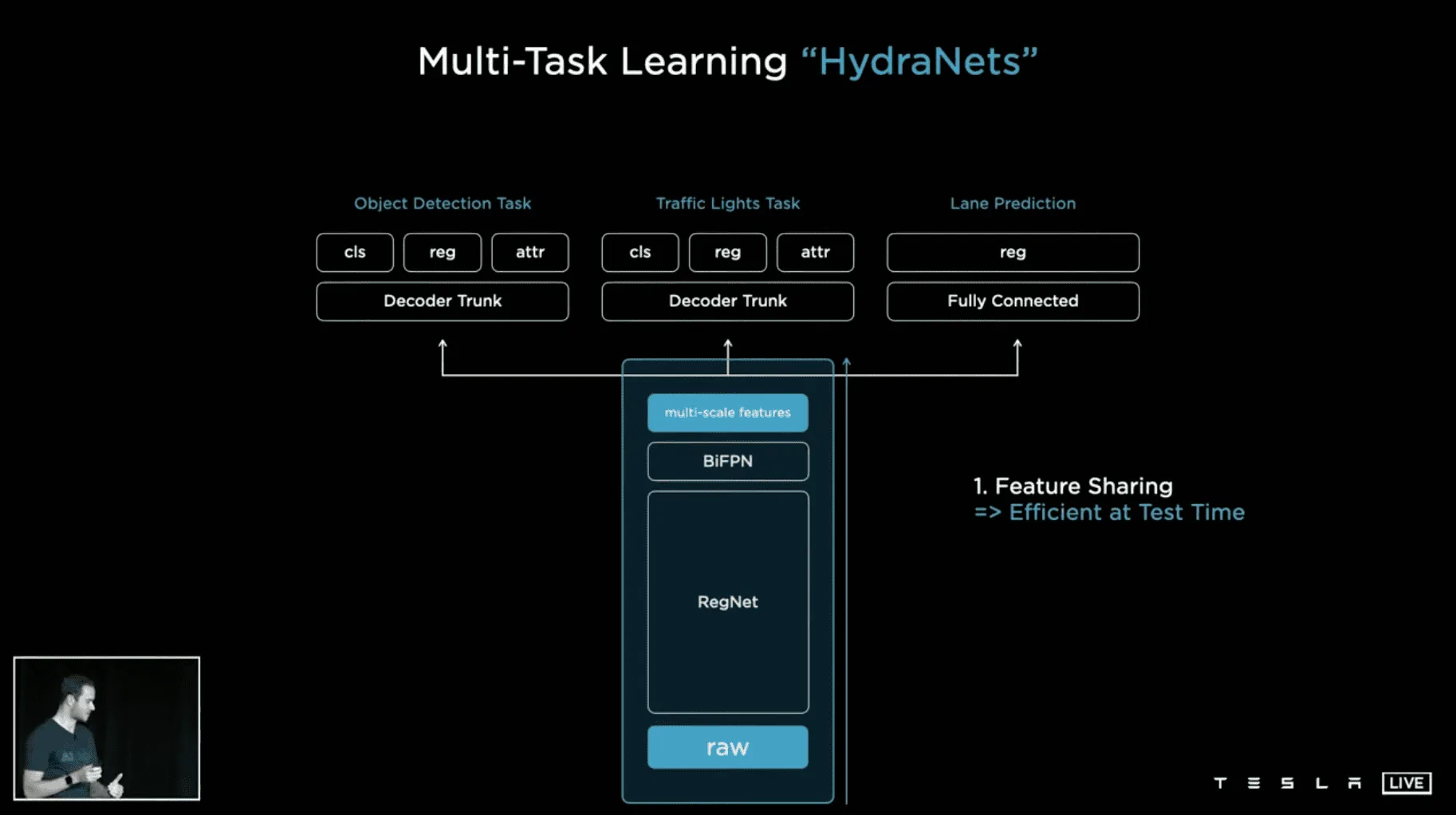
 There must be some confusion.. I did say "any kind of post-proccessing" , so i think the confusion may have been my bad. What i meant is that they disable any post processing done by the manufacturer, and do their own processing of the RAW CMOS sensor data.
There must be some confusion.. I did say "any kind of post-proccessing" , so i think the confusion may have been my bad. What i meant is that they disable any post processing done by the manufacturer, and do their own processing of the RAW CMOS sensor data.